|
|
ANNOUNCEMENTS &
NEW ITEMS:
(Most recent at top of column)
(2026 May): Addressed is the question:
How can a failed universe
model claim to be successful? All one has to do is ignore the key
evidence —highly-relevant observations.
(2026 February 13): Currently under review is a restructured
overview of DSSU Theory ... a presentation of the essential elements of
Natural Cosmology.
Meanwhile, we remember the Dresden Holocaust:
February 13-15 marks the 81st anniversary of the greatest evil in the
history of mankind. Historian Herbert L. Brown, in his recent book, calls it
“The Dresden Massacre—the worst war crime in history” ...
The Devil’s Handiwork ...
(2025 December 5): An overview of the essentials of DSSU Cosmology is
currently being prepared.
Meanwhile. The persecution of the productive
class intensifies. Collectivism, Communism, and Socialism deepen their grip
on the Western World.
“In practice, socialism is the political application of the philosophy
of egalitarianism. Socialist 'equality' does not mean 'equality before and
under the law' —it means equity: the 'equality' of results. It means that
those who work hard, take risks, and produce the goods, services, and
products upon which a society's survival depends, must be punished to the
degree of their success, while those who do not fit into the productive
class (for whatever reason) are to be rewarded by sharing in the products
they had no part in creating.” –Just Right #939
(2025-11-19)
(2025 August 22): Announcing a positive development for the Fifth
Cosmology revolution: A new Web
Domain has been acquired for the promotion of the Dynamic
Steady State Universe: www.DSSU.info
Meanwhile. Amazing but not surprising,
for this is how Communism works. A citizen is fined $28,870.50 merely for
walking into a forested area —for strolling through a piece of property of
which he is the owner! Under Communism you might think you’re the owner, but
in reality you own nothing! The full story is posted at: Just Right #926 August
20 (with link to podcast).
(2025 August 15): Recent problem with sending email to ... @CellularUniverse.org
has been corrected.
(2025 August 8): A high-quality HTM version of "Mainspring of the
Universe –The Mechanism Sustaining the Universe’s Steady State" is
now available. File:
Mainspring(ijcaa-R)-Ranzan.htm
(2025 August 1): The latest research article, "Nature’s Maximal Mass
Density and the Mechanism Keeping It Constant," has been
PUBLISHED in the
International Journal of Astrophysics and Space Science, (Vol.13,
No.3). For an overview and background details, see the current
Press Release.
(2025 June 6): Another triumph for DSSU theory. Two baffling
aspects of neutron stars have been resolved: ● The long-standing
question of maximal density. ● And the question relating to total mass, Why
are almost all neutron stars the same mass-size?
The relevant research paper is currently undergoing editorial peer-review.
Meanwhile, mankind’s enslavement continues. It
works like this: In order to get people to accept a fully-surveilled, open
prison, cashless society, social credit system, ... a gradual wearing down
process is implemented. “First you wear people down. Poison them with drugs,
vaccines, fluoride, and chemical assaults so they become fat and dumb. Put
addictive devices in their hands and bombard them with propagandized movies,
TV, and Masonically-controlled actors and musicians. Destroy the food
supply, poison the water and the air, manufacture fake climate change while
blaming it all on the people, and tax them to death for it.” Push
‘sustainability’ according to the UN-2030 Agenda and the
World-Economic-Forum Cult. Work towards the implementation of “15-minute
SMART-city enslavement camps.” At the same time “give them all sorts of
distractions, from the two-party political charade (with the illusion of
choice when it is a totally rigged game), manufacture social disharmony, and
grow up controlled opposition to divide and conquer any truth movement that
appears to be gaining any momentum.”
“Then fill them with rage from all the injustices, making
everyone broke and struggling so they have no time to research and figure
out the con. Slowly erase [censor] the internet so nothing of worth comes up
in searches anymore and you successfully have a dumbed-down, ignorant, slave
population.”
The Globalists are succeeding at this game —for “they have
mastered understanding human psychology.”
–per Article by Amandha Dawn Vollmer, as in Druthers, Issue #42 (May 2024)
(2025 May 2): Dynamic Aether Theory of Gravity has now been published in the
SCIREA
Journal of Physics (Vol.10, Issue 2, April 2025 | pp.39-62)
● LINK to the Journal
version.
Abstract.
● LINK to the high-resolution
Reprint
Version.
Meanwhile: We stand at a crisis—the
supreme crisis of the ages. For unnumbered millenniums man has toiled
upward from the dank jungles of savagery toward glorious heights which his
mental and spiritual potentialities give promise that he shall attain. His
path has been slow and wavering. Time and again he has lost his way and
plunged into deep valleys. Man’s trail is littered with the wrecks of dead
civilizations and dotted with the graves of promising peoples stricken by an
untimely end. –Lothrop Stoddard’s dire warning of the dangers of the
practice of dysgenics (1921 !)
(2025 March 1): Currently under review, research article updating the
DSSU aether theory of gravity.
Meanwhile author Joe Martino comments on “Humanity’s
Crisis”. He rhetorically asks “What are we missing? Who’s the
enemy?” His answer to Humanity’s Crisis is for individuals to apply his
Four Principles: Break the Illusion (awareness and self-awareness); Awaken
Neutrality (curiosity); Awaken Possibility; and Live Aligned.
However, the deeper, more meaningful, answer to What are we
missing? Who’s the enemy? may be found in the classic book:
The World
Conquerors, The Real War Criminals by Louis Marschalko
(2025 February 12): New research paper is nearing completion ... It
details a major advancement in DSSU gravity theory.
Meanwhile, we remember Dresden: February 13-15
marks the 80th anniversary of the greatest evil in the history of mankind.
Time, once again, to reflect on the
Hellstorm Destruction of Dresden and mourn the over half-million
victims. We need perspective, Russia kills a few people in a drone
attack one night and the news dominates the ‘News’ networks; Palestinians
kill 1,200 Israelis in a raid and the Jewish lobby flies into hysteria. Yet,
Allied mass fire-bombing of Dresden in 1945 killed over 300,000 civilians
and its perpetrators were hailed as war heroes! Details.
Dare to know the truth. On
Dresden 80th Anniversary --Genocide of Europeans.
(2024 July 12): Press Release:
Remarkable convergence of gravity theory and empirical evidence has revealed
the cosmic-scale geometry of the Universe.
The DSSU research article "Natural
Cosmic-Scale Geometry of Our Universe" has now been published. Links
are posted here. □
Meanwhile, the war on civilization escalates:
● See the reports at Big Sky Free Press –Beyond the Headlines
(http://www.bsfreepress.net/)
● Assassination attempt on President Donald Trump (https://www.youtube.com/watch?v=ozCQwPyVKlE).
(2024 June 21): After some now-familiar rounds of fake reviews and
rejections, the latest DSSU research article —entitled Natural
Cosmic-Scale Geometry of Our Universe— has been accepted for
publication. It is an outstanding work, outstanding in the sense that
the underlying theory agrees wonderfully with the empirical evidence —the
abundant and incontrovertible astronomical observations. This is science of
the highest standard. And yet, one reviewer flatly asserted, “It is
completely unscientific,” and recommended rejecting the article
(prompting the editor of the Journal of High Energy Physics, Gravitation
and Cosmology to decline its publication). What!? Thirty-eight
supporting references is not science!? And what about the text and
diagrammatic content being as clear as a cloudless day? … Yes, that
journal, and two others, recognized a serious threat to their sacred
Worldview. □
Meanwhile the decline of civilization and the loss of freedom
continues.
There is an ongoing reinstitution of the ancient practice of
slavery. "During this revival of servitude and oppression, the systems of
enslavement have been greatly upgraded and enhanced, for the purpose of
effectively enslaving the entire human race."
"One of the true motivations behind the DNA altering vaccines, that
are being imposed on all of humanity, is to genetically engineer mankind
with a view to create a new model of human that will perfectly obey
their modern masters."
–Dr. Reiner Fuellmich, Corona Investigative Committee, Grand
Jury Summary (
www.StopWorldControl.com )
(2024 March 8): The Cosmic Geometry paper is currently being
peer-reviewed.
Meanwhile: “The disintegration of Western civilization is
proceeding so rapidly that I cannot keep up with it even as a full time job.
… It is happening right in front of our eyes.” –PaulCraigRoberts.org
(2024 February): New research paper, focusing on the large-scale geometry
of the Cosmos, is currently being readied for publication. It details
the arrangement of gravity cells and how the rhombic dodecahedron is
embedded within a superoctahedron.
Meanwhile: Reflect on the mega-crime of the last century —Dresden
Hellstorm (February 13-15, 1945). It is appalling to think its
perpetrators were actually hailed as war heroes!
● The
Blood of Dresden by Kurt Vonnegut
●
Dresden 1945: The Devil’s Tinderbox by Charles Lutton
(2023 October): The
Gerhard Herzberg Award, 2023: Canada's most prestigious prize for
science and engineering went to Yoshua Bengio, a scientist who
helped make the AI revolution possible. As the scientific director of the
Montreal Institute for Learning Algorithms and professor at the University
of Montreal, he is both excited and cautious about the future of the
technology he helped create. Congratulations.
(2023 October 12): George Orwell Free Speech Award, 2023:
Congratulations to Jurgen Neumann who was presented with the award
“For outstanding courage in challenging censorship and defending freedom in
pursuit of the truth and for outstanding talent as a freedom communicator &
videographer …”
(2023 September): Newly posted:
Question regarding The Fermi Paradox.
Where are other advanced civilizations?
Meanwhile, history continues to repeat itself and teach essential
lessons:
“As is becoming increasingly more obvious, even to historical novices,
mainstream academia, mass media and what passes for journalism these days is
agenda driven, not truth driven. Certain narratives and ideas that
advance particular agendas are elevated and promoted, while dissenting or
alternative perspectives and viewpoints are hysterically dismissed or
censored.” –The Barnes
Review Vol.29, No.5 (Sept/Oct 2023, p69)
(2023 August):
Important UPDATE to the so-call discovery/detection of gravity
waves (the ones predicted by Einstein’s geometric gravity theory). Turns
out no gravity waves were detected! Just as I had suspected and reported
years ago. … What the LIGO and VIRGO teams actually found was a match-up
between measured signal noise and preprogrammed idealized wave
patterns (i.e., computer stored preexisting general-relativity gravity
waves). It was simply the result of a computerized search to obtain a very
approximate and partial fit between measured signal and simulated “chirps.”
…What was presented to the ever-credulous public was not the actual recorded
waves, but rather the pre-stored-in-computer-memory idealized wave patterns!
Such are the findings of a collaboration of four researchers. [Abstract
& link to full article in the International Astronomy and
Astrophysics Research Journal]
Meanwhile, the collapse continues:
“The United States is falling apart in real time.” –The Barnes Review (July/Aug 2023,
p30)
Suppressed is the essence of the spirit needed to resist the accompanying
enslavement: “That traditional suspicion and disdain of an overreaching
centralized government; that ambitious, fearless, risk-taking outlook; that
love of individual liberty and personal freedom; that hardworking,
productive, can-do attitude —these and similar characteristics are the
essence of the true American spirit.” –The Barnes Review (July/Aug 2023,
p22)
(2023 July 28):
Author’s Curriculum Vitae has been updated to include the discovery
of meta-thermodynamics processes.
(2023 July 21): The revolution in cosmology continues. The first
documentation of Nature’s entropy-lowering mechanism —involving a
structure encompassing two separate and independent processes— has been
published. The latest DSSU article presents a discussion of how cosmic-scale
entropy neutrality is maintained —how two processes prevent the Universe
from ever running down. Press
Release.
Meanwhile: The Great Enslavement continues. The ongoing
implementation measures and events —including real and imagined crises— are
too numerous for the average person to keep track of, let alone deal with.
Sometimes too covert to recognize. Oftentimes seemingly benevolent, like the
pending implementation of digital currency. And always propagandized.
(2023 July 1): The report on Nature’s Entropy-Lowering
Processes has been accepted for publication. Five of five
journal-appointed Reviewers deemed the research article to be
"scientifically correct." ... Details to follow.
(2023 March 24 ... April 15): Latest research paper Nature’s Entropy-Lowering
Processes is currently under review.
Meanwhile: Tyranny in Canada! The persecution of Pastor Artur
Pawlowski. Listen to the incredible first-hand account: Just Right Program
#802 (2023-3-16)
(2023 February): DSSU research article currently being prepared deals with
entropy ... with a focus on Nature's remarkable entropy-lowering
mechanism.
(2023 January 16): Who would believe it! An American official holiday for
communism and its foremost promoter. Clearly the lessons of history have
been ignored … all the while the repression, and enslavement, continues.
(2023 January): DSSU Cosmology is now into its 22nd year
on the Internet —the revolution continues.
ANNOUNCEMENTS & comments from
earlier years are available HERE.
|
|
(2022 December 28): Now PUBLISHED !
“Laws of Physics Twentieth-Century Scientists
Overlooked”
Available on AMAZON.com
and on
amazon.ca
The Nature of Gravitational Collapse
Subtitle: How the photon, the particle of light, is responsible for mass,
gravity, superneutron stars, and supermassive black holes
—Reveals the truth about stellar and supermassive black holes.
This work contains 311+ pages, 67 illustrations, references, and
index. …
Second printing details (2017 November)
First printing details (Lambert Academic
Publishing, 2017 July)
Guide to the Construction of the Natural Universe
Participate in a unique exploration of the Cosmos: venture into the
sub-atomic realm, even into the sub-quantum realm where the roots of reality
reside, and into the domain of cosmic-scale cell-structure and beyond to
infinity. Along the way, discover the cause of mass, the cause of
gravitation, and rediscover Einstein’s “nonponderable” aether and Heraclitus’
harmony-of-opposites principle. … The book represents the ultimate
vindication for all the skeptics who resisted the "preposterous" Big Bang
mythology and who refused to join the exploding-cosmos religion.
The book contains 317 pages, 61 illustrations, references, and
index …
Available from
C-FAR Books.
Or use this
mail-in Order Form.
(Also available at
Niagara Falls Public Library)
POPULAR RESEARCH PAPERS:
Mass-to-Energy Conversion,
the Astrophysical Mechanism –Published in Journal of High Energy
Physics, Gravitation and Cosmology, Vol.5, No.2 (2019).
HTML version.
Nature’s Supreme Mechanism
for Energy Extraction from Nonmaterial Aether –Published in
Infinite Energy
Magazine Vol.24,
Issue#144 (2019 March/April)
The Nature of Gravity –How One Factor Unifies Gravity’s Convergent,
Divergent, Vortex, and Wave Effects –Published in the International
Journal of Astrophysics and Space Science, Vol.6,
No.5, 2018.
-------------------------
Natural Mechanism for the Generation and Emission of Extreme
Energy Particles –Published in Physics Essays
Vol.31, No.3, p358 (2018). (Reprint)
-------------------------
Sachs-Wolfe Effect Disproof –Published in the International
Journal of Astrophysics and Space Science, Vol.6, No.1, 2018. (
Abstract & Links.)
"The Nature of Gravitational Collapse"
–Published in American Journal of Astronomy & Astrophysics. (
Abstract and Links.)
(Note, there is a typo in AJA&A posted version in the Fig-10
caption. It should read: … acceleration is proportional to 1/r2.)
|
|
Glossary of Terms
used in Cosmology and Astrophysics with particular emphasis on DSSU theory.
(Opens in separate Window or Tab)
|
|
GENERAL INTEREST ARTICLES:
Mysteries & Paradoxes that Plague Standard Cosmology
(Updated 2015-7)
Cosmology Crisis of 1998 (Revised 2015-5)
Critique of Conventional Cosmology ...
comments relating to the 'preposterous' expanding-universe paradigm.
Bafflement
—the remarkable admission of a physicist.
The Cosmology Debate That Never Happened
—During the 20th century there was a decades-long debate: The cataclysmic
expanding universe VS the stable expanding universe. But there has never
been a debate of the dynamic expanding universe VS the dynamic
non-expanding universe. (Posted
2011 Oct)
Models of the Universe
—Historical, Expanding, and Cellular universes. INCLUDES USEFUL TABLES FOR
COMPARING THEORIES.
The Universe Is Infinite
(Part 1)
—overcoming a "central" problem of cosmology theories.
The Universe Is Infinite
(Part 2)
—an explanation of how the universe can always have existed and will always
exist.
DSSU, The
Non-Expanding Universe: Structure, Redshift, Distance
—A long sought-after goal of astrophysicists has been a formulation of cosmic distance that is
independent of the speed of light. The goal has now been achieved. The
present Paper details the surprisingly simple distance expression and its
validating agreement with Supernova data.
Why Copernicus Did Not Need a Force of Gravity
—Explores the question of why no one, except Newton, invoked a force.
(Re-Posted February, 2014)
Gravity and Lambda —A Story of Opposites
(.htm) —A story of opposites in harmony. Key differences between the Conventional
Cosmology and the New Cosmology are presented.
Dynamic Cosmic Cell
—The Structural Component of the DSSU —Animated image and discussion
of the self-sustaining, self-balancing system.
Why
Einstein Did Not Receive the Nobel Prize for His Theory of Relativity
—“By 1922 Einstein had been nominated about fifty times —most were for his
relativity theories.”
Questions & Answers & Comments
|
|
COSMOLOGY ARTICLES, etc:
(2016 June) FREE DOWNLOAD details:
DSSU Validated by Redshift Theory and Structural Evidence,
Physics Essays, Vol.28, No.4, p455-473 (2015 Dec)
—Delivers the coup de grâce to the Big Bang.
Abstract & Links.
Both Reviewers enthusiastically endorsed this "well-written and incisive
article."
The Dynamic Steady State Universe.
This work brings together the main pieces of the cosmic
puzzle in a step-by-step construction of the Natural Universe.
Published in Physics
Essays Vol.27 No.2 (2014 June issue) (PDF download) "... the arguments
are well-made. The article is competent, enjoyable and readable." —Reviewer
for Physics Essays Journal
Revolutionary:
Olbers’
Paradox Resolved for the Infinite Non-Expanding Universe, American Journal of Astronomy & Astrophysics
Vol.4, No.1, (2016 January).
Abstract & links.
Reprint PDF.
Excerpts:
● “The man accredited with discovering universe expansion did not believe
that the universe was expanding. Hubble was convinced that the key evidence,
the cosmic redshift, was caused by some other factor, something more
fundamental than mere expansion.”
● “With the recent discovery of a new cosmic-redshift mechanism, and its
theoretical validation, it turns out that Hubble was right.”
● Explains how “an infinite, non-expanding, perpetually regenerating
universe" is able to predict a dark night sky.
Cosmic Redshift in the Nonexpanding Cellular Universe (
Journal links
) —details the actual causal mechanism. Published in the
American Journal of Astronomy & Astrophysics, Vol.2, No.5 (2014)
Abstract.
Local copy with quality images: (Reprint pdf).
HIGHLIGHTS:
• Entirely new concept for cosmic redshift mechanism;
• Retains the foundation premise of all modern cosmology;
• But does not require whole-universe expansion;
• A redshift based on the DSSU theory of unified gravity & cosmic cellular
structure;
• Remarkable agreement with independently established redshift distances.
The Cosmology Debate That Never Happened
What historians call "the greatest cosmological debate in
history” was between TWO expanding universes —two
hypothetical models that share the same, I repeat, the same
foundational property! If one is to claim some great clash of ideas (let
alone the "greatest") then surely there must exist some deep dividing
difference! (Posted 2011-10)
The Case for a Cellular Universe
—the Story of a Baffling Omission in Modern Cosmology (Rev2014)
Large-Scale Structure of the Dynamic Steady State Universe published in
the American Journal of Astronomy and Astrophysics, Vol.4, No.6,
2016, pp.65-77.
Astract and Links.
Highlights:
■ Presents the first 2 of the 4 main postulates that define the DSSU.
■ Space-medium expansion and contraction are perpetually held in balance,
thus ensuring a non-expanding universe.
■ Explains how the two dynamic processes of the DSSU’s space medium sustain
the cellular structure responsible for the pattern of matter distribution in
our Universe.
Galaxy Morphology:
Ellipticity, Its Origin & Progression in Comoving Galaxies, American Journal of Astronomy & Astrophysics,
AJAA, Vol.3, No.2, 2015.
Journal
Abstract and Links.
Local
high-resolution PDF.
HTML version available from AJAA here.
HIGHLIGHTS:
• Provides the first-ever natural explanation for the cause of the
elliptical shape of nonrotating galaxies
• Retains the foundation premise of all modern cosmology but rejects the
absurd concept of whole-universe expansion
• Takes full advantage of the universe’s cosmic cellular structure and
exploits the DSSU theory of unified gravity domains
• Amazingly, the mechanism that stretches galaxies turns out to be the very
same mechanism that causes the cosmic spectral redshift!
Cosmic-Redshift Distance Law Without c
Without H –Comments &
Links– Simplifying the redshift-distance formula by removing the
speed-of-light constant and the Hubble parameter —while maintaining
agreement with observational evidence.
|
|
DSSU Theory:
DSSU Validated by Redshift Theory and Structural Evidence,
Physics Essays, Vol.28, No.4, p455-473 (2015 Dec)
—Delivers the coup de grâce to the Big Bang.
Abstract & Links.
Both Reviewers enthusiastically endorsed this "well-written and incisive
article."
A historical tour of
universes culminating with the Natural Universe —This
essay gives a thematic tour of historical and modern universes. ... While the Universe
is endlessly speaking, forever sending signals; philosophers and scientists
listen and interpret.
Currently undergoing revision and updating: Theoretical Foundation and Pillars of the Dynamic Steady State Universe —The first complete presentation of all four
postulates of DSSU theory. A powerful paper that resolves the
cause-of-causes paradox, explains the non-independent nature of time, and
reveals the 'supreme advantage'. It includes a concise comparison with
standard cosmology focusing on real-world viability.
The Fundamental Process of Energy —A Qualitative Unification of
Energy, Mass, and Gravity. (Abstract
& Reviews & Links) … This article reveals
the secret behind photon confinement. (Contains only a bare minimum of mathematics
and mainly in one of the 14 sections.)
PART 1 published in
Infinite Energy Magazine Issue #113 (Jan/Feb 2014)
PART 2 published in
Infinite Energy Magazine Issue
#114 (Mar/Apr 2014)
Headlined as:
A "Conceptual Unification of Energy, Mass and Gravity"

Dynamic Cosmic Cell
—The Structural Component of the DSSU —Animated image and discussion
of the self-sustaining, self-balancing system.
Unified Gravitation Cells
of the DSSU —Constructing the Universe with Cosmic Gravity Cells
Aether Flow
Equations and Expansion-Contraction Rates (pdf) —This paper
explores the mathematical aspects of the two space-medium postulates of DSSU
theory —and uncovers some profound consequences.
|
|
ARTICLES on AETHER:
Documentary
movie footage in which Einstein states, "There exists an aether"
—High
resolution .mpg video.
—Low
resolution .wmv video.
The
Aether Experiments and the Impact on Cosmology
—Aether was detected first in 1887 and then several more times during the
20th century. Its 21st–century "rediscovery" (in 2001) led to the long-sought causal mechanism of
gravity —a discovery which has revolutionizing cosmology.
Michelson-Morley and the
Story of the Aether Theory —Richard Milton's analysis of the
historical details involving the misrepresentation, bias, and cover-up that
hampered the Aether theory.
The History of the Aether Theory
—The historic development of the
aether as a scientific theory of the universal space medium. What started as the "fifth
element" of Antiquity becomes molded by theoretical constraints and
experimental evidence into the dual-dynamic sub-quantum medium —the Essence of the Universe.
(Updated
2019-12)
Relativity of
Time in the Aether-Space of the DSSU —How intrinsic time and relative time are related.
DSSU Relativity –The Lorentz Transformations Applied to Aether-Space —Ranzan
Reprinted by permission of Physics Essays Publication,
Physics Essays Vol.23, No.3, p520. (2010).
ABSTRACT
Physical Nature of Length Contraction
—the DSSU Theory of Length Contraction Induced by Absolute Motion.
An easy to follow examination of how the mode by which matter is “conducted”
through luminiferous aether causes the matter to contract. A simple
derivation of the mathematical expression for this physical phenomenon is
presented. There is also a brief discussion of relevant historical aspects
and of nonphysical length contraction.
Reviewer's comments:
“This is amazing …” “The paper is interesting …” –Applied Physics
Research reviewer. Published in
Applied Physics Research journal
Vol.5, No.1
(2013
Feb).
Contradiction Divides Two Aether Theories
—An exploration into the three parts of the speed-of-light postulate.
Reprinted by permission of PEP, from
Physics Essays Journal
(Vol 24, No.3, Sept, 2011)
...
ABSTRACT
Basic-level mathematical and graphical exploration of dynamic aether flow:
PDF
Here is an external webpage with an extensive list of
research papers on the aether-drift experiments, and the larger question of energy in space.
|
|
DSSU RESEARCH PAPERS:
Sachs-Wolfe Effect Disproof (published in in the International
Journal of Astrophysics and Space Science Vol.6, No.1, 2018.)
Abstract & links.
DSSU Cosmic Redshift-Distance Relation (htm)
—Converting the cosmic redshift into distance for our Cellular Universe using
a simple and elegant equation.
Large Scale Structure of the Dynamic Steady State Universe (pdf)
How a dual-dynamic space medium sustains the cellular structure (published in AJAA in 2016).
—Presents the postulates and implications of regional space-medium expansion and contraction.
Cosmic-Scale Structural Features Explained (pdf)
(Chapter 2 of original DSSU Manuscript)
—The Spacing of Clusters
—Sheets of Galaxies
—Supernodes
—Right-angled Walls of Galaxies.
The Cosmic Background Radiation in the DSSU
—The natural explanation of the microwave background radiation applicable to
the natural Cellular Universe.
Ellipticity, Its Origin & Progression in Comoving Galaxies,
American Journal of Astronomy & Astrophysics, AJAA, Vol.3, No.2, 2015.
Journal
Abstract and Links
Local
high-resolution PDF.
HTML version available from AJAA here.
HIGHLIGHTS:
• Provides the first-ever natural explanation for the cause of the
elliptical shape of nonrotating galaxies
• Retains the foundation premise of all modern cosmology but rejects the
absurd concept of whole-universe expansion
• Takes full advantage of the universe’s cosmic cellular structure and
exploits the DSSU theory of unified gravity domains
• Amazingly, the mechanism that stretches galaxies turns out to be the very
same mechanism that causes the cosmic spectral redshift!
|
|
GRAVITY:
The Nature of
Gravity –How One Factor Unifies Gravity’s Convergent, Divergent, Vortex, and
Wave Effects
–Published in International Journal of Astrophysics and Space Science
(IJASS),
Vol.6, No.5, 2018, pp.73-92. (Abstract and Links.)
"Revolutionary"
The Nature of Gravitational Collapse
–Published in American Journal of Astronomy & Astrophysics Vol.4,
No.2, 2016, pp.15-33. (Abstract and Links.)
(Note, there is a typo in AJA&A posted version in the Fig-10
caption. It should read: … acceleration is proportional to 1/r2.)
Gravity and Dark Energy (How they
Shape the Universe) –An Introduction. Provides a preamble and overview
for a couple of earlier DSSU articles.
The Processes of Gravitation –The Cause and Mechanism of Gravitation
by C. Ranzan –A revolutionary paper on gravity published in J. Mod. Phys.
Appl. Vol.2014:3 (2014).
(Abstract & Reviews & Links.
Includes link to hi-resolution PDF)
Why Copernicus Did Not Need a Force of Gravity
—Explores the question of why no one, except Newton, invoked a force. (Rev 2011-9)
First ever, journal-published paper featuring the DSSU:
The Story of Gravity and Lambda –How the Theory of Heraclitus Solved the Dark Matter Mystery
–Ranzan
Reprinted by permission of
PEP, from
Physics Essays, Vol 23, No1, p75-87 (2010 Mar).
ABSTRACT
This is the cure for the fallacious belief in cosmic-scale Dark Matter.
The Story of Gravity and Lambda –How the Theory of Heraclitus Solved the Dark Matter Mystery
(Color version) –Ranzan
Considered "an excellent contribution to the [PE journal]" --professional reviewer
(2010).
Unified Gravitation Cells of the DSSU
—Constructing the Universe with Cosmic Gravity Cells
|
|
RELATIVITY ARTICLES:
Why
Einstein Did Not Receive the Nobel Prize for His Theory of Relativity
(●Abstract ●Links ●Excerpts ●Extras)
—“By 1922 Einstein had been nominated about fifty times —most were for his
relativity theories.”
Einstein’s Simple Mathematical Trick –and the Illusion of a Constant Speed
of Light
(Abridged version with links to Journal-published version. Posted 2013)
Extended Relativity –Exploiting the Loopholes in Einstein's Relativity.
A Logical extension of special relativity. Reprinted by permission of
PEP,
from
Physics Essays Vol.25, No.3 (2012).
— Abstract & Links & Reviews —
The Three Components of the Speed-of-Light Postulate.
Published in Physics Essays journal Vol.26,No.1 (2013)
Local copy:
The
Three Components of the Speed-of-Light Postulate (pdf):
Absolute vs relative. Variance vs invariance. Another instance of the Heraclitian
"Harmony of Opposites." (Reprinted by permission of PEP, from
Physics Essays, Vol.26, No.1,
2013).
Relativity of Time in the Aether
Medium of the DSSU
—Absolute Motion and Intrinsic Time
Resolving a Paradox in Special Relativity –Absolute Motion and the Unified Doppler Equation.
(Posted 2011, July). Reprinted by permission of
PEP, from
Physics Essays Vol.23, No.4, p594 (2010).
ABSTRACT
How DSSU Relativity Resolves the Speed Paradox (Introductory Discussion)
—Absolute Motion Resolves a (speed) Paradox in Einstein’s Special Relativity.
(Supplementary Discussion)
DSSU Relativity –The Lorentz Transformations Applied to Aether-Space
(Posted 2011). Reprinted by permission of Physics Essays Publication,
Physics Essays Vol.23, No.3, p520. (2010).
ABSTRACT
The Key that Extends Einstein’s Relativity (Part 1)
—Response to a reviewer critical of DSSU aether-based relativity
The Key that Extends Einstein’s Relativity (Part 2)
—How to convert abstract-space equations into aether-based equations
Restoring the Physical Meaning of Energy
Published in
Applied Physics Research journal
Vol.5, No.2
(2013).
LOCAL COPY:
Restoring the Physical Meaning of Energy —distinguishing
between the apparent energy and the real energy of moving mass.
|
|
An Open Letter to the Scientific Community
(Published in New Scientist, May 22, 2004)
"The big bang today relies on a growing number of
hypothetical entities, things that we have never observed-- inflation, dark
matter and dark energy are the most prominent examples. Without them, there
would be a fatal contradiction between the observations made by astronomers
and the predictions of the big bang theory. In no other field of physics
would this continual recourse to new hypothetical objects be accepted as a
way of bridging the gap between theory and observation. It would, at the
least, raise serious questions about the validity of the underlying theory.
..."
continues
...
A devastating Declaration of opposition to Big Bang cosmology
signed by more than 400 Researchers.
Full text:
CosmologyStatement.org
or alternate
site.
|
|
INTELLECTUAL FREEDOM:
This website is mainly concerned with revisionism in cosmology. Those of us
involved in replacing the unnatural expanding-universe paradigm are aware of
the difficulties involved.
However,
other revisionists have unimaginable difficulties. Consider the ongoing
persecution of revisionists in other fields of intellectual pursuit:
"It makes you wonder —about the immense effort being made
by State and State-sponsored organizations with budgets of tens of millions
of dollars and thousands of employees and associates to smother and punish
these few men and women. Every punishing instrument imaginable is used,
every vicious slander conceivable, every flagrant and pervasive form of
censorship that law allows, including the imprisonment of simple writers for
thought crimes against the State. ... Makes you wonder." —Bradley R. Smith (2011-1)
●
"Discussing truth is so controversial, so dangerous … In most of the world it is simply illegal.”
–
Gordon Duff, Senior Editor, Veterans Today (2011)
●
"The further a society drifts from truth the more it will hate those who
speak it." –George Orwell
● Why the suppression of free speech is so deadly dangerous:
“When you silence the man of the pen, you
must deal with the man of the sword.” –proverb
● "Free speech is the
essence of Civilization."
–Stephen Molyneux, Address at the EU Parliament (2019-1-21).
|
DEDICATION: This website is solemnly dedicated to those
individuals who have conducted research in their chosen field and have
informed others of their inquiries and suffered the consequences when
subpoenaed by the Inquisition or some variant thereof. The dedication
extends to those individuals currently imprisoned, and those facing
trial and persecution simply for exercising their basic human right of
freedom of expression supposedly granted to them under the UN Charter of
Human Rights.
"Every
year, hundreds of writers and other literary professionals around the world
are imprisoned, prosecuted, persecuted, attacked, threatened, forced into
exile or even murdered as a result of their work."
ALSO: Be aware of the continuing threat to our precious freedom of expression on the
Internet. The threat is serious and relentless. It is described as “… the formal effort to mimic Communist China’s
system of Internet censorship.” –
www.InfoWars.com
More information on threats to internet freedom: https://battleforthenet.com/
End of free speech in Britain:
A publisher of history books in Britain has reported that “due to new laws
in the UK all their books will have to be censored moving forward” to avoid
criminal penalties for “inciting racial hatred.” –The Barnes Review (2020 March/April)
p77
A hostile jury, by a hasty unanimous
verdict, decided that British Nationalist Leader Jez Turner deserves to be sent to
jail for his critical views! Report (2018-5-15).
British Maverick Psychologist
jailed for publishing his research. … “The ambivalence of librarians
getting writers imprisoned quite defies comprehension.” –Simon Sheppard
(2013)
In repressive Germany:
Ursula Haverbeck,
89, Sentenced to 14 Months in Jail for Heresy! –2017 November
This amazing 89-year-old woman continues advocating under the dictum: "Only
the truth will set you free”.
Mrs. Haverbeck, along with her late husband, founded the education facility
Collegium Humanum in 1963, but which was banned by the Marxist thought police in
2008.
Update (2018-5-16): Ursula Haverbeck will celebrate her 90th birthday in a
German prison
cell. The sprightly grandmother is now serving a
two-year prison term without parole merely for stating a sincerely
held opinion that is supported by acclaimed academics worldwide!!
“Frau Haverbeck is now sentenced to two years in prison, merely for her
peaceful historical research” –The Barnes Review Vol.24, No.5
(Sept/Oct 2018) p71
UPDATE (2019-11):
On November 9th (2019), the very day of Ursula Haverbeck’s 91st. birthday,
hundreds of German nationalists, patriots and friends, well-wishers and
admirers rallied in her support. Report on the Rally to Celebrate
Political Prisoner Ursula Haverbeck.
Update (2020-12): This 92-year-old peaceful woman has just
been released from jail, having spent 2&1/2 years behind bars, and less than
2 weeks later was in court in Berlin for more charges ... was
again sentenced to prison!!!
George Orwell Free Speech Awards:
The 2022 George
Orwell Free Speech Award was presented to Alfred and Monika Schaefer,
July 30, 2022 in Vancouver.
The George Orwell
Free Speech Award for 2024 went to former political prisoner Brad
Love: ● Citizen journalist ● Suffered the longest jail sentence under
Canada’s notorious anti-free-speech “hate law” ● An inquisitive free-thinker
who asks the press & politicians questions they don’t want to answer ●
Presented by the Canadian Association for Free Expression.
The George Orwell
Free Speech Award for 2025 was presented (in Toronto) to William
Whatcott:
“For
Outstanding Courage In Challenging Censorship / and Defending Freedom In
Pursuit of the Truth / And for enduring prison and state and private
prosecutions and job loss / in order to witness to the rights of the unborn
and to oppose the death culture of the LGBTQ agenda, / and all done with
Christian love, creative humour and a good heart.”
The Supreme Irony:
Fellow freedom-lovers and truth-seekers, please pay
close attention. ... Chemist, historian, and author, Germar Rudolf
sums up the persecution in Germany as follows:
“Now I will summarize here the pseudo-logic hiding behind this absurd and
criminal nonsense of persecuting dissidents. This logic of those in power in
[Germany] really amounts to this:
Because in the past minorities have been persecuted, dissidents imprisoned
and books burned, one feels obliged to do everything in order to prevent a
repetition —even if that entails having to persecute minorities, imprison
dissidents and burn books. [Italics as in the original.]
Because that is exactly what is happening today! Absolutely nothing has been
learned from the past. The table is merely turned around, and for a change a
different group is now being persecuted.”
–Germar Rudolf, Resistance is Obligatory 2nd edition (Castle Hill
Publishers, Box 243, Uckfield, UK, 2016) p213
□
The Continuing Struggle for Freedom
A ray of hope in the ongoing struggle for freedom. Populist and nationalist
movements around the world are gaining ascendancy over the New World Order’s
effort to establish global governance and impose tyrannical control over
every last square meter of the Earth’s surface. –The Barnes Review
Vol.23 No.1 (2017 Jan p70)
"This
Is Very Serious" –S. Molyneux, 2018-7
(7-minute
video on the importance of freedom of speech)
The ongoing fight for freedom and truth. –Just
Right Media (2020, Sept 18, program)
● Pro-Freedom NEWS:
Vanguard News
● InfoWars NEWS: InfoWars
| AlexJones
● Freedom Force
Red Pill University
for truth-seekers.
For more on Freedom (and Objectivism),
visit:
Freedomain Radio (www.freedomainradio.com)
presented by Stefan Molyneux.
Just Right Media (www.justrightmedia.org)
|
|
... about the author ...
Curriculum Vitae
.jpg)
© Copyright 2005-2026 by
Conrad Ranzan & DSSU Research
CONTACT:
D S S U Research,
Niagara Falls, Canada
25 years on the Internet.
Most recent update:
2026 May 22
Visits since mid-2010 :
2026-5-22
|
| |
The Key that Extends Einstein’s Relativity
(Part 2)
Conversions between abstract-space equations and aether-medium equations
Conrad Ranzan
2010
|
Contrary to the Einstein assumptions,
absolute motion is consistent with relativistic effects, which are caused by
actual dynamical effects of absolute motion through the quantum foam, so that it
is Lorentzian relativity that is seen to be essentially correct.
–Reginald T. Cahill
|
How to Convert an Einstein Special Relativity Equation into a
Corresponding Aether-Medium Equation
The “Key” is a simple equation. It converts an Einstein abstract-space
equation into a corresponding aether-permeated-space equation. Its derivation is
detailed in DSSU Relativity
–The Lorentz
Transformations Applied to Aether-Space, (Physics Essays Vol.23,
No.3, 2010) (Abstract). In that Paper the Key appears as equation (4-7):
| Conversion equation: |
.jpg) |
(4-7) |
The symbols
u,
uA, and
uB represent
collinear velocities or velocity components; c is the speed of
light. The absolute motion of reference frame “A” is given by
uA, and the
absolute motion of reference frame “B” is given by
uB. And the
relative motion between them is u.
This equation serves three purposes:
(i) converts the absolute speeds
uA and
uB to a
relative speed;
(ii) ensures the predicted observable relative speed
u is always less than
c;
(iii) links any Einstein special relativity (ESR)
expression to an equivalent aether-referenced equation.
Our interest is focused on purpose (iii).
To make the conversion from an Einstein abstract-space equation to an
aether-medium equation we simply substitute the above expression and do the
algebra.
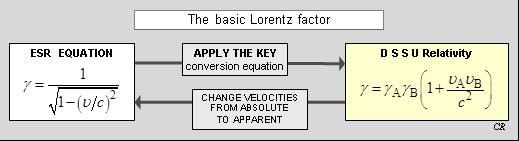
First we’ll convert the commonly used Lorentz factor.
| |
 |
|
| |
Flowchart 1.
Lorentz factor (gamma, γ) conversions.
To go from ESR to DSSU the procedure is to substitute the conversion
equation. To go from DSSU to ESR the procedure is as follows: Observer
in frame A considers himself motionless, thus
uA is
replaced by zero. Then the motion of frame B becomes the
relative motion; and so
uB
is replaced by
u.
Note that
γA
and γB are intrinsic Lorentz factors (1− (uA /c)2)−1/2
and (1− (uB /c)2)−1/2. |
|
When converting the aether-referenced Lorentz factors,
γA and
γB, use the same method
stated in the caption for Flowchart 1. Change
the velocities from ‘absolute’ to ‘apparent’ (or relative). That is, change the
velocities for A and B from aether-referenced to
observer-referenced.
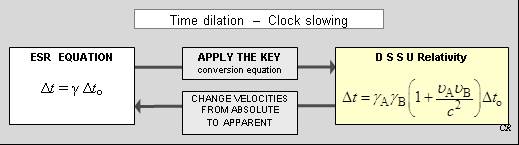
Time Dilation, Clock Slowing
If time is what is measured by clocks, then time dilation is more
properly called clock slowing. Consider an observer in frame A and another observer in frame B.
The two frames are in relative motion with respect to each other. And, they
are also in absolute motion with respect to the aether. Next,
consider the time interval between two events —such as two ticks of a clock. The
expression ∆to
is a clock-time interval measured within, say, frame B; while
∆t
is the corresponding time interval determined by the observer in frame A.
The question is, “How does observer B’s ∆to
compare with observer A’s clock-time?”
| |
 |
|
| |
Flowchart 2.
Time dilation (clock slowing) equation conversions. To go from ESR to DSSU
the procedure is to substitute the "conversion equation." To go from DSSU
to ESR the procedure is as follows: Observer A considers himself
motionless, thus
uA is
replaced by zero. Then the motion of frame B becomes the
relative motion; and so
uB
is replaced by
u.
The expression
∆to
is the proper time measured from within the particular clock's
own reference frame. |
|
Observer A “sees” that observer B’s time as being dilated. In
other words the relatively moving clock appears to run slower.
Note that the gamma factor (γ) is
always greater than unity. However, the difference between
γ and 1 is not significant unless the
velocity is greater than one-tenth the speed of light.
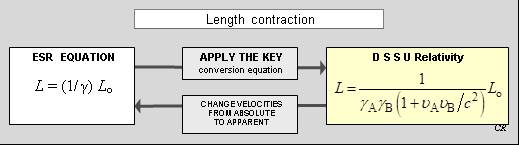
Length Contraction
| |
 |
|
| |
Flowchart 3.
Length contraction equation conversions. To go from ESR to DSSU the
procedure is to substitute the conversion equation. For the procedure
for going from DSSU to ESR, see the Flowchart-1 caption. The conversion
also applies to the various gamma (γ)
factors as detailed for Flowchart 1. |
|
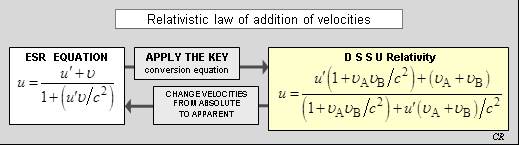
Velocity Transformation
The velocity transformation equation, shown in
Flowchart 4, is also known as the relativistic law of addition of
velocities. It transforms an apparent velocity u′ within one frame,
say B, into an apparent velocity u for an observer in the other
frame (relatively moving frame A).
Simply put, if an observer B measures the speed of some object to be
u′ then observer A will find the speed of the same object to be
u.
| |
 |
|
| |
Flowchart 4.
Velocity transformation equation conversions. To go from ESR to
DSSU the procedure is to substitute the conversion equation. For the
procedure for going from DSSU to ESR, see the Flowchart-1 caption. |
|
What is significant about the DSSU expression is that the transformation of
an apparent velocity/speed (apparent speed u′ into apparent speed
u) is accomplished by the use of absolute motions.
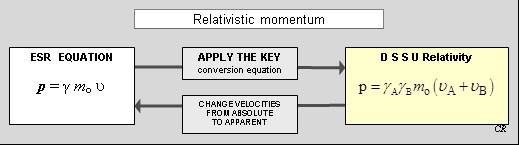
Relativistic Linear Momentum
The momentum of an object is defined as the product of its mass times its
velocity. The classical expression, suitable for normal speeds, is,
p = m
u .
When the velocity magnitude is a significant fraction of the speed of light,
rest mass m must be replaced by the relativistic mass, expressed
as γmo.
The expression for relativistic mass is a mathematical consequence of
the Lorentz transformation and the law of conservation of momentum.
| |
 |
|
| |
Flowchart 5.
Relativistic linear momentum equation conversions. To go from ESR
to DSSU the procedure is to substitute the conversion equation. For the
procedure for going from DSSU to ESR, see the Flowchart-1 caption. (The
various γ factors are converted as detailed in Flowchart 1.) |
|
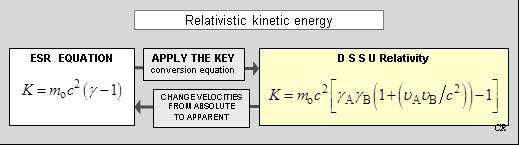
Relativistic Kinetic Energy
The relativistic kinetic energy of a particle (or mass) is defined as
the difference between the total energy, and the rest energy.
| |
 |
|
| |
Flowchart 6.
Relativistic kinetic energy equation conversions. To go from ESR to
DSSU the procedure is to substitute the conversion equation. For the
procedure for going from DSSU to ESR, see the Flowchart-1 caption. (The
various γ factors, again, are converted as detailed in Flowchart 1.) |
|
The Detection of Absolute Motion —Reality and Method
Absolute motion was first detected in the year 1887 by Albert Michelson and
Edward Morley. It was a pioneering attempt to measure the Earth’s motion with respect to the aether
that pervades the universe and fills all space.
There are two known methods for measuring absolute motion (its magnitude
and direction). One is the traditional method (based on a 2nd order
effect of
u/c); the other is a
comparatively new method (based on a 1st order effect of
u/c). The first method is the
gas-mode Michelson optical interferometer and dates back to 1887. It is a
cumbersome method that measures an extremely weak effect (an effect that has
often been misinterpreted). The second method is the detection of a speed
anisotropy associated with radio-frequency transmissions (beamed or
cable-conducted). It involves measuring the time difference of transmissions
along a cable (or through air or space) in opposite directions. The idea is to
measure the one-way transmission time, say in the north-to-south direction,
between transceiver stations, and then to compare it with the transmission time
for the south-to-north direction. The Roland De Witte Experiment of 1991 was of
this kind. The magnitude of the difference varies as the Earth and ‘apparatus’
rotate with respect to the celestial sphere; the variation with direction
provides a map of the anisotropy.
For the
details on this 1st order method of measuring absolute motion
(magnitude and direction) see Professor Reginald T. Cahill’s article,
The
Roland De Witte 1991 Experiment (to the Memory of Roland De Witte)
(Progress
in Physics, Vol.3, July, 2006 ) pp60-65 [Posted at:
www.ptep-online.com/index_files/2006/PP-06-11.pdf
]
What About the Cosmic Absolute Reference Frame?
What about the well-known absolute frame of reference provided by the CBR
—the frame in which the CBR is isotropic)? ... This frame is highly useful for
referencing cosmic scale motions, such as the drift of galaxies and other
astronomical objects —and even the flow of aether-space itself ! But it has no
practical use in special relativity. The reason is that relativity
(whether ESR or DSSU) applies to ‘local’ motions only. It applies to local
motion only, because Relativity Theory is dependent on what local aether-space
is doing (how it is moving) —in Einstein’s version, of course, it depends on
what local abstract-space is doing (how it is curving/distorting).
How Important is Absolute Motion?
It turns out that absolute motion is the very cause of relativistic effects
—both apparent and intrinsic. Absolute motion is what determines
observer-dependent effects as well as observer-independent effects.
Most importantly absolute motion is now understood to be the cause of the
various relativistic effects, in complete contradiction with the Einstein
viewpoint, but in accord with the earlier proposal by Lorentz.
–Reginald Cahill [The Speed of Light and the Einstein Legacy:
1905-2005 Infinite Energy, Vol.10, Issue 60,
pp.28-37 (2005)]
(This Part-2 article has focused mainly on the apparent effects
—the ones that depend on the apparent relative motion between two
frames, or two observers. The absolute effects are detailed in the full-version
Paper.)
* * * *
|
|
LINK to Part 1 of this article:
The Key that Extends
Einstein’s Relativity (Part 1)
Author’s response to a reviewer critical
of DSSU aether-medium relativity
2010-10
Top of page
Back to DSSU Home Page
|
|

.jpg)